SISTEM BUS
Sistem bus dalam arsitektur komputer
merujuk pada bus yang digunakan oleh sistem komputer untuk menghubungkan semua
komponennya dalam menjalankan tugasnya. Sebuah bus adalah sebutan untuk jalur
di mana data dapat mengalir dalam komputer. Jalur –jalur ini digunakan untuk
komunikasi dan dapat dibuat antara dua elemen atau lebih. Data atau program
yang tersimpan dalam memori dapat diakses dan dieksekusi oleh CPU melalui
perantara sistem bus.
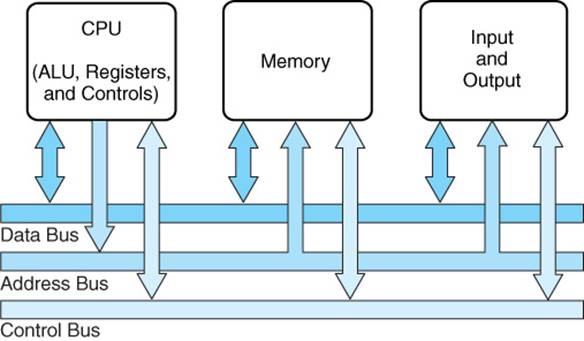
Gambar Sistem Bus
BUS
Pengertian bus adalah bagian dari
sistem komputer yang berfungsi untuk memindahkan data antar bagian- bagian
dalam sistem komputer. Data dipindahkan dari piranti masukan ke CPU, CPU ke
memori, atau dari memori ke piranti keluaran. Bus meruppakan jalur komunikasi
yang dibagi pemakai suatu set kabel tunggal yang digunakan untuk menghubungkan
berbagai subsistem. Sistem bus adalah sebuah bus yang menghubungkan
komponen-komponen utama komputer (CPU, Memori, I/O). Sistem bus adalah
penghubung bagi keseluruhan komponen komputer dalam menjalankan tugasnya.
Bus pada CPU dapat dibedakan atas :
1. Data Bus ( Saluran Data )
2. Address
Bus ( Saluran Alamat )
3. Control
Bus ( Saluran Kendali )
JENIS-JENIS SISTEM BUS
a. Data bus (Saluran Data)
Saluran data memberikan lintasan bagi
perpindahan data antara dua modul sistem. Saluran ini secara kolektif disebut
bus data. Umunya bus data terdiri dari 8, 16, 32 saluran.
b. Address Bus (Saluran Alamat)
1. Saluran alamat digunakan untuk
menandakan sumber atau tujuan data pada bus data. Misalnya , bila CPU akan
membaca sebuah word dat adari memroi, maka CPU akan menaruh alamt word yang
dimaksud pada saluran alamat.
2. Digunakan
untuk mengirinkan alamat word pada memori yang akan diakses CPU.
3. Digunakan untuk saluran alamat
perangkat modul komputer saat CPU mengakses suatu modul.
4. Semua peralatan yang terhubung dengan
sistem komputer, agar dapat diakses harus memiliki alamat.
c. Control Bus (Saluran Control)
Saluran kontrol digunakan untuk
mengontrol akses ke saluran alamat dan penggunaan data. Karena data dan saluran
alamat dipakai bersama oleh seluruh komponen, maka harus ada alat unruk
mengontrol penggunaanya. Berikut ini adalah fungsi-fungsi yang
terdapat pada control bus (saluran control):
1. Digunkan untuk menspesifikasi sumber
dan tujuan data pada bus data.
2. Digunakan
untuk mengirim alamat word pada memori yang akan diakses CPU.
3. Digunakan untuk saluran
almat perangkat modul komputer saat CPU mengakses suatu modul.
4. Semua peralatan yang
terhubung dengan sistem komputer, agak dapat diakses harus memiliki alamat.
Contoh : mengakses port I/O, maka port I/O harus memiliki alamat hardware-nya.
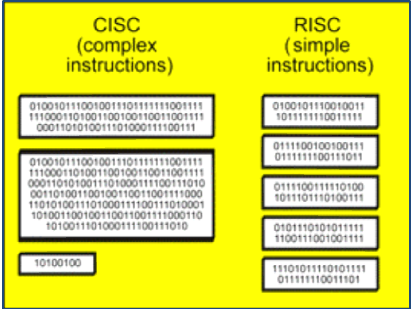
ARITHMATICAL LOGICAL UNIT (ALU)
Arithmatic
Logical Unit (ALU), adalah salah satu bagian/komponen dalam sistem di
dalam sistem komputer yang berfungsi melakukan
operasi/perhitungan aritmatika dan logika (Contoh operasi
aritmatika adalah operasi penjumlahan dan pengurangan, sedangkan contoh operasi
logika adalah logika AND dan OR. ALU bekerja besama-sama memori, di mana hasil
dari perhitungan di dalam ALU di simpan ke dalam memori.
Perhitungan
dalam ALU menggunakan kode biner, yang merepresentasikan instruksi yang akan
dieksekusi (opcode) dan data yang diolah (operand). ALU biasanya menggunakan
sistem bilangan biner two’s complement.
ALU mendapat data dari register. Kemudian data tersebut diproses dan hasilnya
akan disimpan dalam register tersendiri yaitu ALU output register, sebelum
disimpan dalam memori.
Pada
saat sekarang ini sebuah chip/IC dapat mempunyai beberapa ALU sekaligus yang
memungkinkan untuk melakukan kalkulasi secara paralel. Salah satu chip ALU yang
sederhana (terdiri dari 1 buah ALU) adalah IC 74LS382/HC382ALU (TTL). IC ini
terdiri dari 20 kaki dan beroperasi dengan 4×2 pin data input (pinA dan pinB)
dengan 4 pin keluaran (pinF).
Arithmatic
Logical Unit (ALU), fungsi unit ini adalah untuk melakukan suatu
proses data yang berbentuk angka dan logika, seperti data matematika dan
statistika. ALU terdiri dari register-register untuk menyimpan
informasi. Tugas utama dari ALU adalah melakukan perhitungan aritmatika
(matematika) yang terjadi sesuai dengan instruksi program. Rangkaian pada ALU
(Arithmetic and Logic Unit) yang digunakan untuk menjumlahkan bilangan
dinamakan dengan Adder. Adder digunakan untuk memproses operasi aritmetika,
Adder juga disebut rangkaian kombinasional aritmatika.
Ada 3 jenis adder:
1) Rangkaian Adder dengan
menjumlahkan dua bit disebut Half Adder.
2) Rangkaian Adder dengan
menjumlahkan tiga bit disebut Full Adder.
3) Rangkain Adder dengan
menjumlahkan banyak bit disebut Paralel Adder
CU
(Control Unit)
Control Unit (CU) adalah salah
satu bagian dari CPU yang bertugas untuk memberikan arahan/kendali/kontrol
terhadap operasi yang dilakukan di bagian ALU (Arithmetic Logical Unit) di
dalam CPU tersebut. Output dari CU ini akan mengatur aktivitas dari bagian
lainnya dari perangkat CPU tersebut. Pada awal-awal desain komputer, CU
diimplementasikan sebagai ad-hoc logic yang susah untuk didesain. Sekarang, CU
diimplementasikan sebagai sebuah microprogram yang disimpan di dalam tempat
penyimpanan kontrol (control store). Beberapa word dari microprogram dipilih
oleh microsequencer dan bit yang datang dari word-word tersebut akan secara
langsung mengontrol bagian-bagian berbeda dari perangkat tersebut, termasuk di
antaranya adalah register, ALU, register instruksi, bus dan peralatan
input/output di luar chip. Pada komputer modern, setiap subsistem ini telah
memiliki kontrolernya masing-masing, dengan CU sebagai pemantaunya
(supervisor).
Tugas dari CU adalah sebagai
berikut:
1.Mengatur dan mengendalikan
alat-alat input dan output.
2.Mengambil instruksi-instruksi
dari memori utama.
3.Mengambil data dari memori
utama kalau diperlukan oleh proses.
4.Mengirim instruksi ke ALU bila
ada perhitungan aritmatika atau perbandingan logika serta mengawasi kerja.
5.Menyimpan hasil proses ke
memori utama.
Macam-macam CU :
1. Single-Cycle CU
Proses di CUl ini hanya terjadi
dalam satu clock cycle, artinya setiap instruksi ada pada satu cycle, maka dari
itu tidak memerlukan state. Dengan demikian fungsi boolean masing-masing
control line hanya merupakan fungsi dari opcode saja. Clock cycle harus
mempunyai panjang yang sama untuk setiap jenis instruksi. Ada dua bagian pada
unit kontrol ini, yaitu proses men-decode opcode untuk mengelompokkannya
menjadi 4 macam instruksi (yaitu di gerbang AND), dan pemberian sinyal kontrol
berdasarkan jenis instruksinya (yaitu gerbang OR). Keempat jenis instruksi
adalah “R-format” (berhubungan dengan register), “lw” (membaca memori), “sw” (menulis ke memori), dan “beq” (branching). Sinyal kontrol yang dihasilkan
bergantung pada jenis instruksinya. Misalnya jika
melibatkan memori ”R-format” atau ”lw” maka akan sinyal ”Regwrite” akan aktif.
Hal lain jika melibatkan memori “lw” atau “sw” maka akan diberi sinyal kontrol
ke ALU, yaitu “ALUSrc”. Desain single-cycle ini lebih dapat bekerja dengan baik
dan benar tetapi cycle ini tidak efisien.
2.
Multi-Cycle CU
Berbeda dengan unit kontrol yang
single-cycle, unit kontrol yang multi-cycle lebih memiliki banyak fungsi.
Dengan memperhatikan state dan opcode, fungsi boolean dari masing-masing output
control line dapat ditentukan. Masing-masingnya akan menjadi fungsi dari 10
buah input logic. Jadi akan terdapat banyak fungsi boolean, dan
masing-masingnya tidak sederhana. Pada cycle ini, sinyal kontrol tidak lagi
ditentukan dengan melihat pada bit-bit instruksinya. Bit-bit opcode
memberitahukan operasi apa yang selanjutnya akan dijalankan CPU, bukan
instruksi cycle selanjutnya.
REGISTER
Register merupakan
alat penyimpanan kecil yang mempunyai kecepatan akses cukup tinggi, yang
digunakan untuk menyimpan data dan instruksi yang sedang diproses, sementara
data dan instruksi lainnya yang menunggu giliran untuk diproses masih disimpan
di dalam memori utama. Setiap register dapat menyimpan satu bilangan hingga
mencapai jumlah maksimum tertentu tergantung pada ukurannya. Register-register
dapat dibaca dan ditulis dengan kecepatan tinggi karena berada pada CPU.
FUNGSI
REGISTER
User Visibel
Register :
Register CPU yang dapat digunakan oleh
pemrogram, dengan menggunakan set intsruksi memungkinkan satu buah register
atau lebih untuk dispesifikasian sebagai operand atau alamat operand.
Register CPU yang dapat digunakan oleh
pemrogram, dengan menggunakan set intsruksi memungkinkan satu buah register
atau lebih untuk dispesifikasian sebagai operand atau alamat operand.
a. General Purpose
Register
- Digunakan untuk mode pengalamatan dan
data.
- Akumulator ( aritmatika, Shift,
Rotate)
- Base Register (Rotate,Shift, aritmatika)
- Counter Register ( Looping)
- Data Register (menyimpan alamat I/O device)
b. Register Alamat
- Digunakan untuk mode pengalamatan
- Segment Register (Code Segment, Data
Segment, Stack Segment, Extra Segment)
- Register Index (Stack Index, Data Index)
- Stack Pointer
c. Register
Data
Digunakan untuk menampung data
d. Register Kode
Status Kondisi (Flag)
Kode yang menggambarkan hasil operasi
sebelumnya
Control dan Status
Register:
Register ini
digunakan oleh unit control untuk mengontrol operasi cpu dan oleh program
system operasi untuk mengontrol eksekusi program.
Control Register
a. Program Counter
(PC)
Berisi alamat
instruksi yang akan diambil
b. Instruction
Register (IR)
Berisi alamat
instruksi terakhir
c. Memory
Address Register (MAR)
Berisi alamat
penyimpanan dalam memori
d. Memori Buffer
Register (MBR)
Berisi data yang dibaca
dari memori






{kind=link}